(一)原因
- 工艺 :
- 在sensor 的制作过程中有灰尘等引起。
- 组装过程中的缺陷:比如模组组装,电路焊接过程中的损伤
- noise :
- sensor gain 增大
- 老化:电子产品的寿命影响有限,导致会随着使用时间增加而引起坏点。温度湿度光照等使用环境都会造成器件老化
(二)分类
- 根据是否变化分类
静态坏点、动态坏点- 静态坏点:不会随着时间、增益等改变,从sensor制造时因为工艺等产生的坏点。
- 动态坏点:因为增益、温度等引起的坏点,会随着时间变化而改变。
- 根据坏点的亮度分类
hotpixel、deadpixel、weakpixel、blinky pixel、stuck to neighbour pixel、phase detection pixel- hotpixel : 比周围点亮很多的坏点 。
- deadpixel:无论什么入射光下,该点的值接近0
- stuck pixel:无论什么入射光下,该点的值接近255
- blinky pixel: 随机值
- stuck to neighbor pixel: 该点的值受相邻的像素通道像素值的影响
- phase detection piexl: 相位像素,PDAF sensor专有的
- 根据单通道相邻坏点的数量分类
单坏点、双坏点、多坏点
如3x3区域内有两个坏点,就叫双坏点。注意坏点数量指的单通道上的相邻坏点数量
(三)对图像的影响
- 如果图像中存在坏点,后续进行插值和滤波处理的时候,会影响到周围的像素值。
- 会造成图像的边缘出现伪彩色的情况,不仅影响清晰度,还影响边缘的色彩
- 会造成图像部分像素闪烁的现象
(四)坏点消除算法评价指标
不能损失原有图像细节
能够去除所有坏点
不能引起artifact
(五)坏点矫正的流程
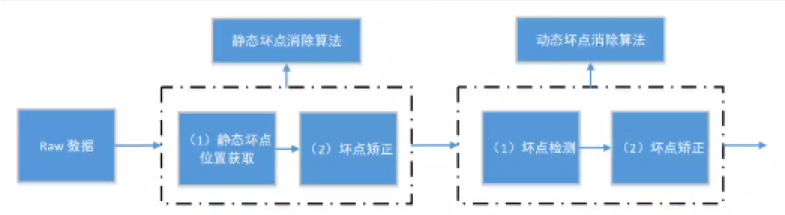
静态坏点消除
一般在sensor 或者模组产线上进行标定,并将坏点位置写在OTP(One Time Programmable)里面

动态坏点检测
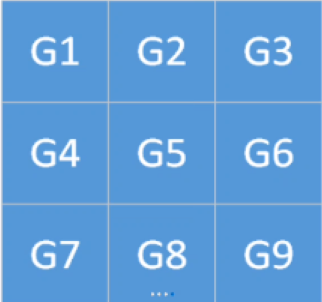
一种典型的坏点检测方法
Gh 是3x3 9个像素内的次大点;Gl 是3x3像素内的次小点(第二小点)
avg = ((G1+…+G9) - (G5+Gh+Gl))./6
dif = Gh - Gl;
在3x3的区域内,如果像素值大于(平均值avg+diff)或者像素值小于(平均值avg-diff),那么就称作坏点。
动态坏点的修正
- 最简单的是中值滤波
- 根据边缘情况,选择进行均值滤波
边缘可以用G1-G9,G2-G8,G3-G7,G4-G6找一个梯度最小的。
if 水平方向: |
(六)可能出现的问题
- noise 的影响
高噪声的情况话,可能会把噪声当成坏点,所以坏点矫正调试时根据ISO进行调试 - 高亮的孤立点:
例如LED 点阵灯、交通灯等。可能会把它当成坏点 - 分辨率卡等
比较密集的条纹不能模糊
(七)特殊的坏点——PDAF
有一种特别的静态坏点:相位像素。部分像素遮左半边,部分像素遮挡右半边,用来快速聚焦。由于遮挡会造成亮度由差异,在图像上表现为坏点。相位像素的分布很规律,位置总是静态不变的,和sensor的型号有关。